Out-of-Distribution Autonomous Driving
Most self-driving systems fail when the unexpected happens. We train and benchmark on the hardest roads on Earth so our models stay robust in every city, in every condition.
Most self-driving systems fail when the unexpected happens. We train and benchmark on the hardest roads on Earth so our models stay robust in every city, in every condition.
Models are deliberately trained on the worst-case scenarios from Lima, Hanoi and Bombay. Adversarial exposure during training produces representations that remain stable under the unexpected.
Our Robusto-1 dataset provides human-validated VQA benchmarks for autonomous driving under out-of-distribution conditions, published at CVPR 2025.
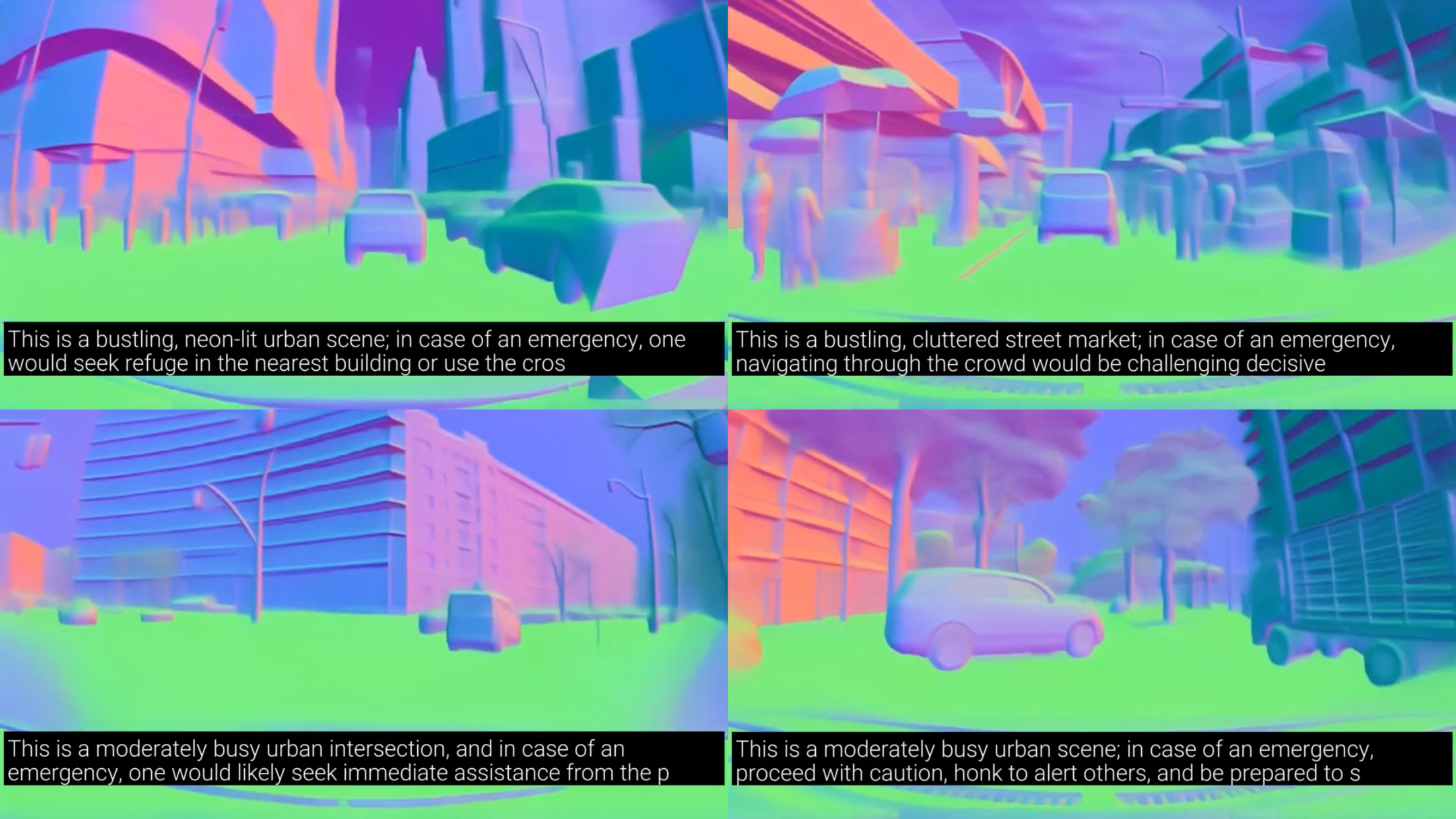
NeuroAI representations trained on OOD data produce human-interpretable failure modes — the vehicle makes the same reasonable mistakes a human driver would, not bizarre hallucinations.
A model trained on Lima's chaos transfers directly to San Francisco, London and Beijing — without city-specific fine-tuning — because OOD training learns universal driving priors.
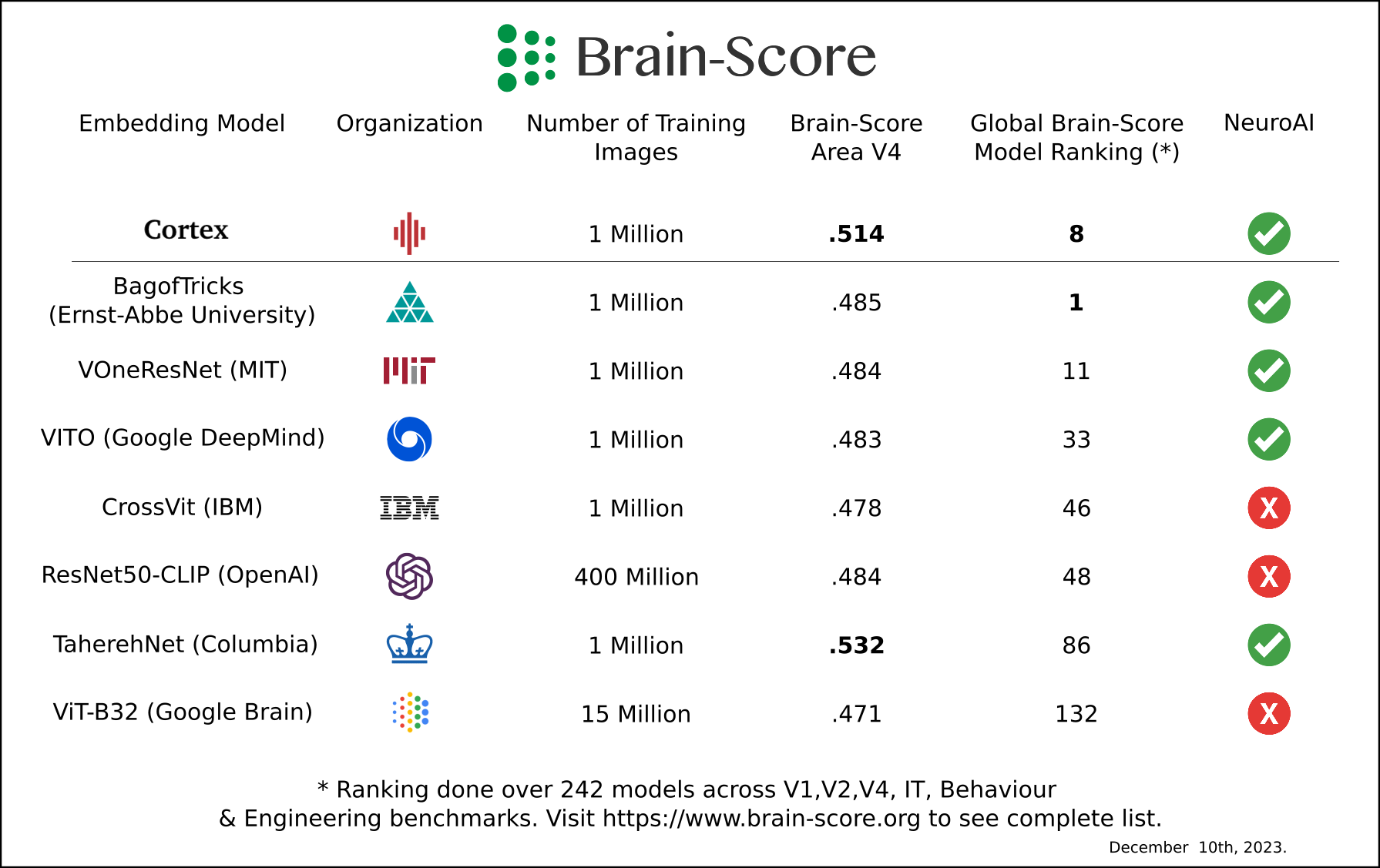
Our foundational Cortex model ranked #1 globally for predicting neural activations in visual area V4 on the Brain-Score benchmark, run by MIT's Quest for Intelligence. Trained for under $15,000, it outperforms models built with orders of magnitude more compute — demonstrating that NeuroAI alignment, not data scale, is the path to robust perception.
Our ROAM challenges at ECCV 2024 and CVPR 2025 invited the global research community to test their models against our Latin American OOD datasets. The results confirmed what we already knew: standard models fail dramatically outside their training distribution, while OOD-trained systems remain robust.

Self-driving companies training and testing on the same city distribution are over-fitting, not generalising. Lima's 22 districts generate rare-mineral data points — tuk-tuks, improvised speed bumps, parade crowds — that create the adversarial diversity needed to push neural networks beyond memorisation and toward genuine road understanding. Copilotless is the only company systematically harvesting this resource.
Training autonomous driving models on massive OOD datasets — and running them safely in real time — demands the world's most powerful GPU infrastructure. Copilotless runs on NVIDIA from data ingestion through to in-vehicle inference.
Adversarial training loops — where the model is repeatedly attacked and retrained — require enormous compute. NVIDIA A100 clusters cut each adversarial training cycle from days to hours, accelerating the robustness iteration loop.
NVIDIA Omniverse and Isaac Sim generate photorealistic OOD scenarios at scale — synthetic rain, night driving, unusual obstacles — augmenting real-world data and filling distribution gaps.
In-vehicle autonomy runs on NVIDIA Jetson Orin modules — the same Jetson platform trusted by robotics leaders worldwide — delivering the low-latency inference required for real-time OOD hazard detection.